ULTRAZVOČNI SLEDNIK NA TISKALNIŠKEM PRIKLJUČKU
ULTRASONIC MOTION SENSOR INTERFACED THROUGH PRINTER PORT
Povzetek
Z ultrazvočnim slednikom določimo razdaljo do gibajočega predmeta. Program avtorja Slavka Kocijančiča podpira enega ali dva slednika povezana z računalnikom preko tiskalniškega priključka. Osnovna funkcija programa je, da sočasno z gibanjem opazovanega telesa riše grafe lege, hitrosti in pospeška v odvisnosti od časa. Program je primerljiv s podobnimi komercialnimi programi. Izhajajoč iz praktičnih izkušenj Tineta Goleža z nekaterimi od njih, vključuje tudi nekatere možnosti, zaradi katerih se zdi program celo uporabnejši. V delavnici bo najprej predstavljena uporaba slednika in programa, nato pa bodo udeleženci sami naredili nekaj eksperimentov.
Ključne besede
računalniško podprti eksperimenti, kinematika, dinamika
Abstract
Ultrasonic motion sensor is used to determine distance of observed body in motion. Programme written by Slavko Kocijancic supports the use of one or two sensors connected to the printer port. The main purpose of the programme is real time plotting of position, velocity and acceleration curves versus time. The programme is comparable to similar commercial products available. According to practical experiences of Tine Golež with some of them, certain additional features make the programme even more useful. The workshop will begin with a demonstration of the sensor and programme. Finally, participants will be able to try some experiments themselves.
Keywords
computer based experiments, kinematics, dynamics
Uvod
Ultrazvočni slednik odda impulz frekvence 40 kHZ in nato zazna odboj od najbližjega telesa. Iz časovne zakasnitve med oddanim in odbitim impulzom ter znane hitrosti zvoka v zraku, preko računalnika določimo oddaljenost predmeta. S periodičnim oddajanjem impulzov lahko spremljamo oddaljenost gibajočega predmeta od slednika. Opisani senzor ponuja večina podjetij, ki imajo v zbirki svojih učil tudi opremo za računalniško podprt laboratorij. V vseh primerih je predvidena priključitev ultrazvočnega slednika preko posebnega računalniškega vmesnika. Posledica tega je visoka cena, zato le redke šole pri nas uporabljajo programe za analizo gibanja teles s pomočjo ultrazvoka. Računalniško podprt šolski laboratorij, ki je na večini naših šol oprt na domačo zbirko programske in instrumentalne opreme ProLab [1], smo zato dopolnili s programom z delovnim imenom Ultra-kinematika. Šole potrebujejo računalnik s procesorjem Pentium, ultrazvočni slednik ameriške firme Vernier [2] pa lahko kupijo preko domačega podjetja. Sledniku smo dodali bodisi prilagoditev za tiskalniški priključek (ne potrebujemo vmesnika) bodisi prilagoditev za priključitev na vmesnik CMC (S1 oz. S2). Brezplačno preskusno različico programa Ultra-kinematika in informacije o nakupu ultrazvočnega slednika najdete na spletni strani opreme ProLab [3].
Pri nastajanju programa so bili v ospredju naslednji cilji: preprostost uporabe, dobre merilne možnosti in pregleden izpis, ki naj bo na 15'' zaslonu dobro viden iz celotne učilnice. Poleg mnogih poskusov program omogoča učitelju in učencu globlje razumevanje ponazoritve gibanja z grafi gibanja. Grafi nastajajo sočasno z gibanjem opazovanega telesa. Takšen pouk fizike zato izgublja pridih uporabne matematike, ki jo ima tam, kjer pomeni poglavje o gibanju predvsem množico nalog, ki smo jim kos z bolj ali manj zapletenim preurejanjem enačb gibanja. Omogoča tudi utrditev za dijake ne lahke zveze med silo in pospeškom. Usvojitev te zveze je temelj za premik od “Aristotelovega” do “newtonovega” pogleda na gibanje.
Osnovne možnosti programa Ultra-kinematika
Uporabnik programa se najprej odloči ali bo uporabljal le en merilnik, ali dva. Merilnik je lahko ultrazvočni slednik, pri uporabi vmesnika CMC pa tudi katerikoli analogni merilnik (recimo sile). Vsakemu ultrazvočnemu sledniku lahko določimo izhodišče (ničlo) in izberemo, katera smer je za nas pozitivna.
Za predstavitev meritev so na voljo štiri okna. Najosnovnejše možnosti ponuja okno z grafi lege, hitrosti in pospeška v odvisnosti od časa (za enega ali dva slednika). Hkrati lahko zahtevamo do tri koordinatne sisteme, vsak od njih omogoča risanje ene ali dveh količin. Izbiramo lahko različne časovne osi in območja spremenljivk. Za krivuljo lege telesa lahko na izbranem intervalu zahtevamo linearno ali kvadratno prilagoditveno funkcijo. Taki funkciji lahko narišemo še pred začetkom meritve. Učencu, ki na zaslonu opazuje krivuljo lastnega gibanja, tako predlagamo, da se giblje čim bliže vnaprej narisani krivulji.
Niso pa vedno zanimive samo časovne odvisnosti, zato je na voljo tudi okno, ki riše odvisnost ene spremenljivke od druge: recimo hitrosti od lege (enakomerno pospešeno gibanje) ali ene lege v odvisnosti od druge (kroženje telesa).
Vse spremenljivke je mogoče izpisati numerično v obliki preglednice. Izpis lahko zahtevamo samo za izbrani interval meritev. Tabelo lahko shranimo v tekstovno datoteko ali preko odlagališča prenesemo v drug program (recimo Excel).
Že med samim merjenjem lahko zahtevamo prikaz trenutne vrednosti spremenljivk v posebnem oknu, kjer lahko dodamo tudi kazalčne merilnike. Okno služi tudi za olajšanje odčitavanja vrednosti spremenljivk iz časovnih krivulj.
Primeri eksperimentov
O tem, da lahko računalnik pripomore k razumevanju interpretacije grafov, je bilo že precej napisanega [4]. Začnimo s tem, koliko morajo dijaki razumeti računalnikove meritve. Osnova pri gibanju je niz podatkov, kako se pri premem gibanju s časom spreminja lega telesa glede na izbrano izhodišče. Dijaki morajo dodobra spoznati, kakšno delo nam računalnik, ultrazvočni slednik in program prihranijo. Po prvem pogovoru o gibanju, opazovani točki razsežnega telesa in definiciji opazovalnega sistema naredimo preprosto meritev. Nekdo gleda na uro in v sekundnih presledkih udarja s svinčnikom ob mizo. Medtem potiskamo model avtomobila po tabli in vsako sekundo označimo njegovo lego. Z ravnilom izmerimo lege da dobimo tabelo x(t). Potem narišemo graf in se pogovorimo o nezanesljivosti takega načina merjenja. Nekateri dijaki poznajo brnač iz osnovne šole. Pri njem lahko opozorimo tako na zaustavljanje ob vsaki oznaki lege kot tudi na nujnost gibanja le v eni smeri. Postopek primerjamo z meritvijo, ki jo opravi ultrazvočni merilnik. Omeniti velja dva podatka: da merilnik lahko največ sto krat na sekundo določi lego telesa in da vse ostalo izračuna iz tega. Pravzaprav dela natančno tisto, kar smo naredili pri prvem poskusi, le da to opravi hitreje, bolj pogosto in bolj natančno.
Pred slednikom se lahko sprehaja dijak, profesor. Da dobimo graf premega in enakomernega gibanja, bomo uporabili zračno drčo ali zakotalimo žogo.
Za enakomerno pospešeno gibanje lahko nagnemo zračno drčo ali preko škripca obesimo utež. Ustrezne meritve dobimo tudi z vozičkom. Namesto tega si oglejmo prosto padanje žoge. Žogo držimo približno pol metra pod slednikom, ki je usmerjen proti tlem. Spustimo jo nekaj trenutkov po tem, ko smo sprožili meritev. Grafa x(t) in v(t) prosto padajoče žoge sta na sliki 1. Odločili smo se za določitev kvadratne prilagoditvene funkcije. Na grafu za lego se je zato izrisala parabola, na grafu za hitrost pa premica. Smerni koeficient te premice ustreza pospešku žoge med letom, med samim odbojem od tal ima pospešek nasproten predznak in bistveno večji. Pospešek je tudi izpisan in ga sami zaokrožimo na 9,6 m/s2.

Slika 1. Prosto padanje žoge
Od neenakomerno pospešenih gibanj si oglejmo nihanje. Pri nihanju uporabimo še dodatno možnost. Hkrati lahko izpišemo tri grafe, tako da dodamo še časovno odvisnost pospeška a(t). Izkaže pa se, da je nazorno graf a(t) narisati skupaj z grafom x(t), saj je v tem primeru nasprotna faza lege in pospeška očitna.
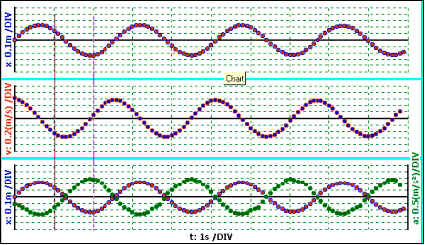
Slika 2. Nihanje žoge privezane na vrvico
Zaključek
Program za ultrazvočni slednik je prvenstveno namenjen pouku fizike na osnovni in srednji šoli, pa tudi predavanjem in laboratorijskim vajam iz klasične fizike na začetku univerzitetnega študija. Uporaben bi bil tudi pri matematiki v osnovni šoli, kjer enakomerno gibanje pogosto navedejo kot primer linearne odvisnosti. Zanj ne potrebujemo posebnega vmesnika, zato naj bi našel svoje mesto tudi pri samostojnem eksperimentiranju učencev. Da bi možnosti še razširili, smo pripravili tudi svetlobna vrata, ki jih lahko prav tako povežemo z računalnikom preko tiskalniškega priključka - izdelava programa je pri koncu. Cilj tovrstne opreme je povezati različne koncepte uporabe računalnika - multimedijsko zasnovana gradiva lahko integriramo z računalniško podprtimi eksperimenti, računalniškimi animacijami in simulacijami,…
Bibliografija
[1] Kocijančič S., "Projektno delo v računalniško podprtem šolskem laboratoriju", V: Čampelj B., Makuc A, MIRK. 99, str. 24 - 29, Ministrstvo za šolstvo in šport, Ljubljana 1999
[2] http://www.vernier.com
[3] http://www.pef.uni-lj.si/slavkok/cbe/
[4] Barton R., "How do Computers Affect Graphical Interpretation", Sch. Sci. Rew. 79, str. 55-60 (1997)
| Slavko Kocijančič Pedagoška fakulteta v Ljubljani Kardeljeva ploščad 16, SI-1000 Ljubljana el. pošta: slavko.kocijancic@pef.uni-lj.si |
Tine Golež Škofijska klasična gimnazija Štula 23, SI-1000 Ljubljana el. pošta: tine.golez@guest.arnes.si |
Avtorja
Dr. Slavko Kocijančič je od leta 1982 do 1989 poučeval fiziko na Gimnaziji Kranj (takrat SŠPRNMU), kasneje pa je vodil vaje in predaval predmete s področja elektrotehnike na Pedagoški fakulteti v Ljubljani. Od leta 1985 razvija opremo za računalniško podprt naravoslovni laboratorij, kar je predstavil na številnih domačih in mednarodnih strokovnih srečanjih. Njegovo raziskovalno delo je uporaba analitičnih metod nelinearne dinamike.
Tine Golež uči fiziko na Škofijski klasični gimnaziji v Ljubljani. Doslej je s prispevki sodeloval na treh mednarodnih konferencah (GIREP) o poučevanju fizike. Vsako leto ima več strokovnih predavanj za slovenske učitelje fizike, občasno pa pripravi tudi poljudno znanstvena predavanja za druge stroke. Njegove članke najdemo v strokovnih revijah (Fizika v šoli, Matematika v šoli, Geografija v šoli) kot tudi v reviji Življenje in tehnika. Z Zavodom za šolstvo je sodeloval kot vodja več projektov v okviru programov Odprta šola in Inovacijski projekti.
Authors
Dr. Slavko Kocijancic taught physics at high school in Kranj from 1982 until 1989. Since then he has taught electrical engineering at the Faculty of Education, University of Ljubljana. He has been developing instrumentation and software for computer based science laboratory since 1985 that was presented at various national and international conferences. His research work focused on the use of analytical methods of nonlinear dynamics.
Tine Golez graduated from the University of Ljubljana's College of Physics and Mathematics with a degree in physics. Since 1994 he teaches physics at St. Stanislaus High School in Ljubljana. He actively participated in three international conferences on the teaching of physics (GIREP). Every year he presents several lectures at teaching-training seminars in Slovenia. In addition other of his lectures have helped make science more accessible to non-scientists. His articles have been published in teacher magazines, most notably in the subject areas of physics, mathematics, and geography, as well as in popular science magazines in Slovenia.